... visits
도커 이미지를 pull 받게 되면 마치 여러개로 분리된 조각을 내려받는 것처럼 보인다.
$ docker pull nginx:latest
Using default tag: latest
latest: Pulling from library/nginx
c499e6d256d6: Already exists
74cda408e262: Pull complete
ffadbd415ab7: Pull complete
Digest: sha256:282530fcb7cd19f3848c7b611043f82ae4be3781cb00105a1d593d7e6286b596
Status: Downloaded newer image for nginx:latest
docker.io/library/nginx:latest
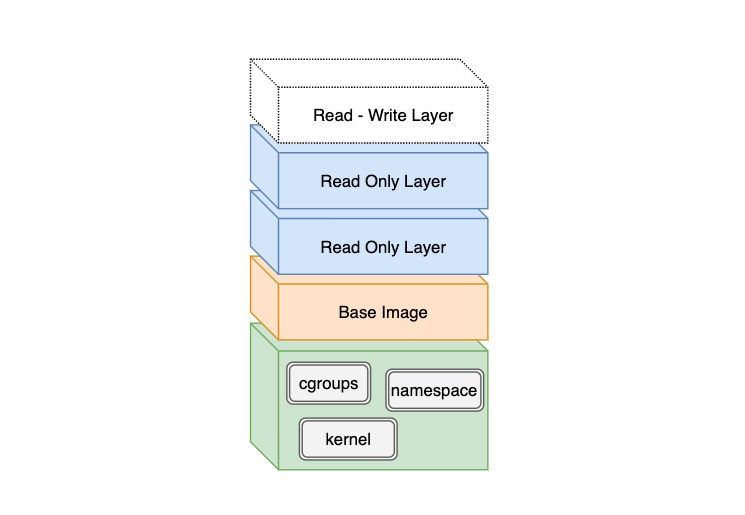
이렇게 분리된 데이터를 레이어(Layer) 라고 한다.
레이어는 도커 이미지가 빌드될 때 Dockerfile에 정의된 명령문(Instructions)을 순서대로 실행하면서 만들어진다. 이 레이어들은 각각 독립적으로 저장되며 읽기 전용이기 때문에 임의로 수정할 수 없다.
실제로 레이어가 어디에 어떻게 저장되는지 정확하게 확인하려면 docker image inspect 명령어를 실행한 뒤 출력된 결과에서 아래와 같은 해시값들을 볼 수 있다.
"sha256:c3a984abe8a88059915bb6c7a1d249fd1ccc16d931334ac8816540b0eb686b45"
"sha256:99134ec7f247e5a211c7205fec587bf72a6d4aac339b21858b892e9c04f78920"
"sha256:d37eecb5b7691ec21bd19989e37f8bb4d20b340a775591d0f3db5897d606b0e4"
이 해시값으로 호스트 머신 내 어딘가 실제 레이어 내용이 저장된 것을 찾을 수 있다.
좀 더 자세한 설명은 “
만들면서 이해하는 도커(Docker) 이미지: 도커 이미지 빌드 원리와 OverlayFS | 44BITS
”를 참고하는 것을 추천한다.
그렇다면 도커 컨테이너가 실행될 때 생성되는 결과물들은 어디에 저장될까?
도커 컨테이너가 실행되면 모든 읽기 전용 레이어들을 순서대로 쌓은 다음 마지막에 쓰기 가능한 신규 레이어를 추가하게 된다. 그다음 컨테이너 안에서 발생하는 결과물들이 쓰기 가능 레이어를 기록되게 되는 것이다.
즉, 아무리 많은 도커 컨테이너를 실행하더라도 기존 읽기 전용 레이어는 변하지 않고, 컨테이너마다 생성된 쓰기 가능 레이어에 데이터가 쌓이기 때문에 서로 겹치지 않으며 컨테이너가 종료되면 모두 사라지게 된다.
도커 이미지 레이어가 중요한 이유는 이미지를 빌드할 때마다 이미 생성된 레이어가 캐시 되어 재사용 되기 때문에 빌드 시간을 단축할 수 있다.
하지만 Dockerfile에 정의된 모든 명령문(Instructions)이 레이어가 되는 것은 아니다.
RUN, ADD, COPY 이 3가지 단계만이 레이어로 저장되고, CMD, LABEL, ENV, EXPOSE 등과 같이 메타 정보를 다루는 부분은 임시 레이어로 생성되지만 저장되지 않아 도커 이미지 사이즈에 영향을 주지 않는다.
이 글의 가장 첫 부분에서 pull 받은 nginx:latest 도커 이미지의
Dockerfile
을 보면 처음에 베이스 이미지를 가져오는 부분을 포함해서 2개 RUN 명령까지 총 3개의 레이어를 받아왔다.
만약 Dockerfile에 RUN, ADD, COPY 명령문이 수정되면 기존 캐시가 무효가 되어 새로운 레이어를 생성하게 될 것이다.
너무나 당연한 말이지만 도커 이미지를 작게 만드는 가장 중요한 첫단계는 작은 베이스 이미지를 사용하는 것이다.
 보통 Alpine 리눅스 도커 이미지
로 시작하는 것을 추천한다.
보통 Alpine 리눅스 도커 이미지
로 시작하는 것을 추천한다.
그 이유는 다른 리눅스 배포판과 비교해 사이즈가 훨씬 작기 때문이다. Alpine 리눅스는 용량이 작은 이유는 C 라이브러리로 musl을 채택했고, 다양한 유닉스 도구들을 탑재한 busybox를 기반으로 하고 있기 때문이다.
하지만 Python 애플리케이션 환경에서 베이스 이미지를 선택할 때는 Alpine 리눅스를 추천하지 않는다. 그 이유는 Using Alpine can make Python Docker builds 50× slower 글을 읽어보는 것을 추천한다.
 요약 하자면 PyPI에 올라간 파이썬 라이브러리들은 보통
요약 하자면 PyPI에 올라간 파이썬 라이브러리들은 보통 Wheel 포맷을 사용하는 데 Alpine 리눅스는 Wheel 포맷을 지원하지 않기 때문에 소스 코드(.tar.gz)를 내려받아 직접 컴파일해야 하는 경우가 있기 때문이다.Wheel 포맷을 지원하지 않는 이유는 musl 라이브러리가 GNU C 라이브러리(glibc)로 컴파일된 Wheel 바이너리를 지원하지 않기 때문이다. 그래서 PyPI를 통해 .whl로 된 패키지가 아닌 소스 코드(.tar.gz)를 다운로드받게 되는 것이다.
Wheel 포맷은 Python에서 설치 없이 바로 실행할 수 있다는 장점이 있다. 그 이유는 Wheel 포맷 자체가 zip 압축에서 확장자만 바꾼 것이며, Python은 Java의 .jar처럼 zip 파일을 바로 실행할 수 있기 때문이다.
그래서 Alpine 리눅스 이미지를 사용한다면 모든 Python 패키지에서 C 코드를 컴파일 해야 하므로 도커 이미지를 빌드하는 시간이 상당히 많이 소모된다.
FROM python:3.8-alpine
RUN apk --update add gcc build-base freetype-dev libpng-dev openblas-dev
RUN pip install --no-cache-dir matplotlib pandas
실제로 맥북 15인치에서 위 Dockerfile을 빌드 했을 때 약 40분 정도 소요되었다. 😅
추가로 덧붙이자면 Alpine 리눅스 이미지를 베이스 이미지로 사용한 Python 이미지는 용량도 크고, 몇 가지 버그들에 대한 취약점도 갖고 있다고 한다.
결론적으로 Python 애플리케이션을 위한 도커 이미지 선택한다면 Debian Buster를 기반으로 한 python:3.8-buster 또는 3.8-slim-buster를 사용하는 것을 추천한다.
(참고:
The best Docker base image for your Python application (January 2020)
)
과거 도커 버전에서는 이미지 레이어 개수가 성능에 영향을 줬다고 한다. 하지만 이제는 그렇지 않다.
그래도 도커 레이어 개수를 줄이는 것은 최적화 측면에서 도움이 된다고 볼 수 있다.
레이어는 RUN, ADD, COPY 명령문에서만 생성되기 때문에 아래와 같이 여러 개로 분리된 명령을 체이닝(chaining) 으로 엮어보자.
레이어 개수가 적다고 도커 이미지/컨테이너 성능에 영향을 주진 않지만 Dockerfile 가독성과 유지 보수 관점에서 도움이 될 것이다.
RUN apt-get update
RUN apt-get -y install git
RUN apt-get -y install locales
RUN apt-get -y install gcc
위 내용을 아래와 같이 단일 RUN 구문으로 체이닝 하면 기존 4개 레이어가 생성되는 것을 1개 레이어로 줄일 수 있다.
그리고 하는 김에 설치할 패키지 순서를 알파벳 순서로 정렬하면 가독성도 높고, 중복 설치를 방지할 수 있는 효과도 있다.
RUN apt-get update && apt-get install -y \
gcc \
git \
locales
아래 샘플 Dockerfile에서는 COPY가 2번 실행된다.
첫번째는 의존성 패키지가 명시된 파일이고, 두번째는 애플리케이션 소스 코드가 저장된 디렉터리다.
FROM python:3.8-slim-buster
WORKDIR /usr/src/app
COPY requirements.txt /usr/src/app
COPY django_project /usr/src/app
RUN pip install -r requirement.txt
CMD ["pip", "freeze"]
보통 의존성 패키지는 자주 바뀌지 않기 때문에 첫번째 COPY 명령으로 생성된 레이어는 캐시 될 것이다.
하지만 두 번째 COPY는 빌드할 때마다 바뀔 수 있기 때문에 캐시가 자주 초기화될 것이고, 그 다음 실행될 RUN명령어에서 수행하는 의존성 패키지 설치가 매번 실행될 가능성이 높다.
이렇게 될 경우 불필요하게 빌드 시간이 늘어나고, 자칫 의존성 패키지 버전을 latest나 *로 해뒀다면 예기치 못하게 패키지 버전이 올라갈 수 있다.
따라서 애플리케이션 코드 복사 명령은 자주 변경되지 않는 명령문 다음에 오는 것이 이미지 빌드 시간을 단축하는 데 유리하다.
이전 단락에서 의존성 패키지를 명시한 파일로 requirements.txt를 사용했다. 이 파일은 Python의 공식 패키지 관리자인 PIP에서 사용하는 관행적으로 지칭하는 파일이다.
Python 개발 환경을 기준으로 봤을 때 PIP는 패키지별 상호 의존성에 관계를 관리할 때 부족한 면이 있다.
그래서 요즘은 좀 더 발전된 Locking 시스템을 갖춘 Pipenv나 Poetry를 사용하는 것을 추천한다.
![]() 이 도구들을 이용해 생성된 Lock 파일 (예:
이 도구들을 이용해 생성된 Lock 파일 (예: Pipfile)을 기반으로 패키지가 설치될 수 있도록 한다면 위 (3) 단락에서 설명한 캐시 레이어의 장점을 얻을 수 있고, 예상치 못한 패키지 버전 업데이트도 방지할 수 있다.
FROM python:3.8-slim-buster
WORKDIR /tmp
RUN pip install pipenv
COPY Pipfile /tmp/Pipfile
COPY Pipfile.lock /tmp/Pipfile.lock
RUN pipenv install --system --deploy
CMD ["pip", "freeze"]
멀티-스테이지 빌드 는 위 (2), (3), (4) 단락에서 했던 노력보다 훨씬 더 효과적으로 도커 이미지 사이즈를 줄이는 방법이다.
멀티-스테이지 빌드는 Dockerfile 1개에 FROM 구문을 여러 개 두는 방식이다.
각 FROM 명령문을 기준으로 스테이지를 구분한다고 했을 때 특정 스테이지 빌드 과정에서 생성된 것 중 사용되지 않거나 불필요한 모든 것들을 무시하고, 필요한 부분만 가져와서 새로운 베이스 이미지에서 다시 새 이미지를 생성할 수 있다.
아래 샘플을 통해 살펴보자.Pipfile에는 uwsgi라는 패키지의 의존성을 명시하고 있고, 이 패키지를 설치하기 위해서는 gcc가 필요하기 때문에 apt-get install gcc를 실행해야 한다.
여기서 예상되는 점은 gcc가 uwsgi설치에만 관여하고 실제 애플리케이션 실행 환경에서는 필요하지 않기 때문에 멀티-스테이지 빌드를 사용한다면 이 부분이 구분점이 될 수 있겠다는 것이다.
FROM python:3.8-slim-buster AS builder
RUN apt-get update && apt-get install -y gcc
WORKDIR /tmp
RUN pip install pipenv
COPY Pipfile /tmp/Pipfile
COPY Pipfile.lock /tmp/Pipfile.lock
RUN pipenv install --system --deploy
FROM python:3.8-slim-buster
COPY --from=builder /usr/local/lib/python3.8/site-packages /usr/local/lib/python3.8/site-packages
CMD ["pip", "freeze"]
COPY --from=builder를 통해 전 단계 스테이지 빌드에서 생성된 특정 결과물만 새로운 BASE 이미지로 복사해서 이미지를 생성했다.
REPOSITORY TAG IMAGE ID CREATED SIZE
python-using-lockfile-multi-stage uwsgi 7e6a652a326d 4 seconds ago 231MB
python-using-lockfile uwsgi 17a4afc08bf7 2 minutes ago 375MB
멀티-스테이지를 사용하는 것과 아닌 것의 사이즈 차이는 약 140MB 정도 발생했다.
특별한 이유가 없다면 멀티-스테이지 빌드를 사용하지 않을 이유는 없을 것 같다.